Remote flag adjustment device
August 2024 - May 2025
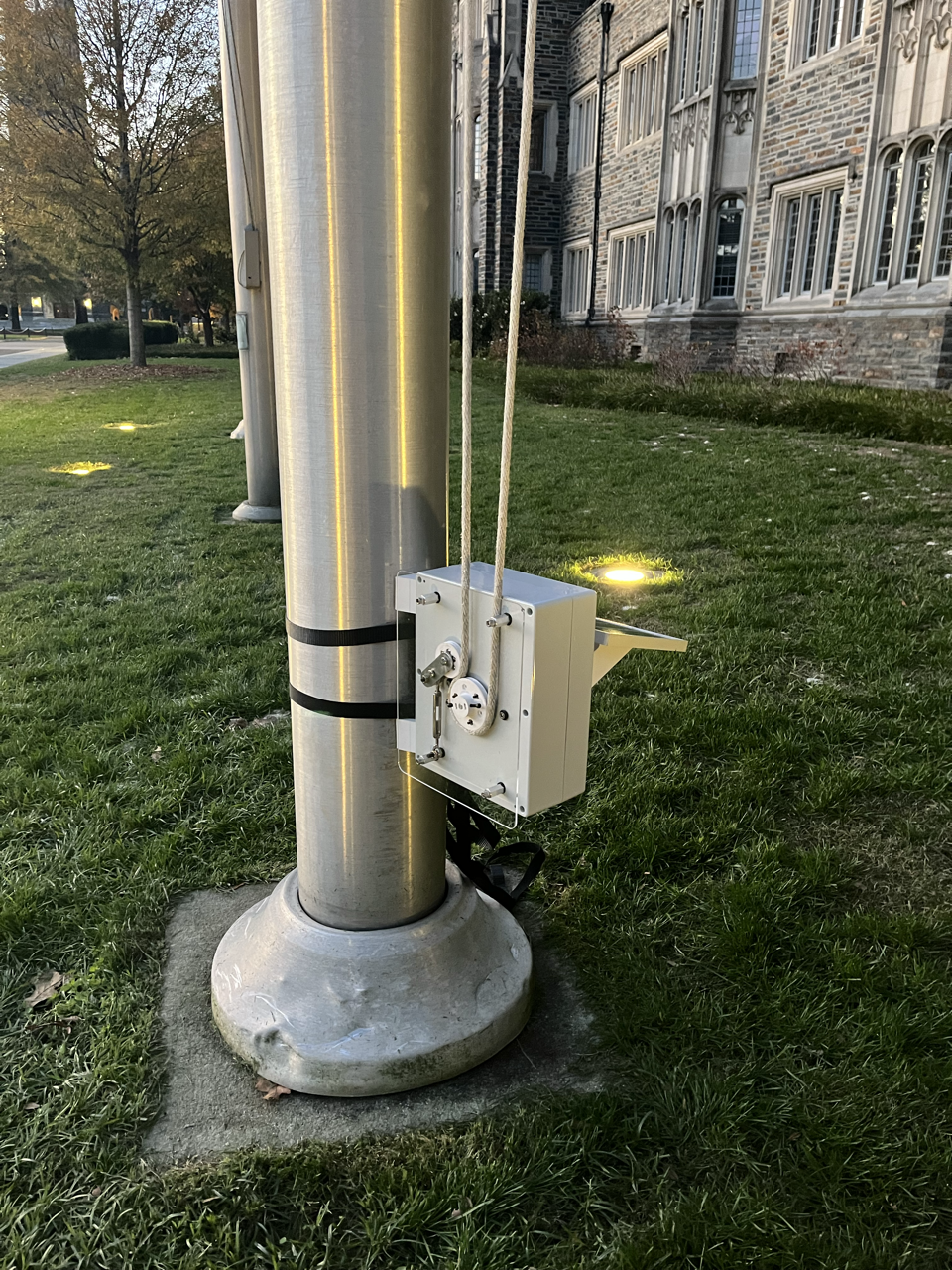
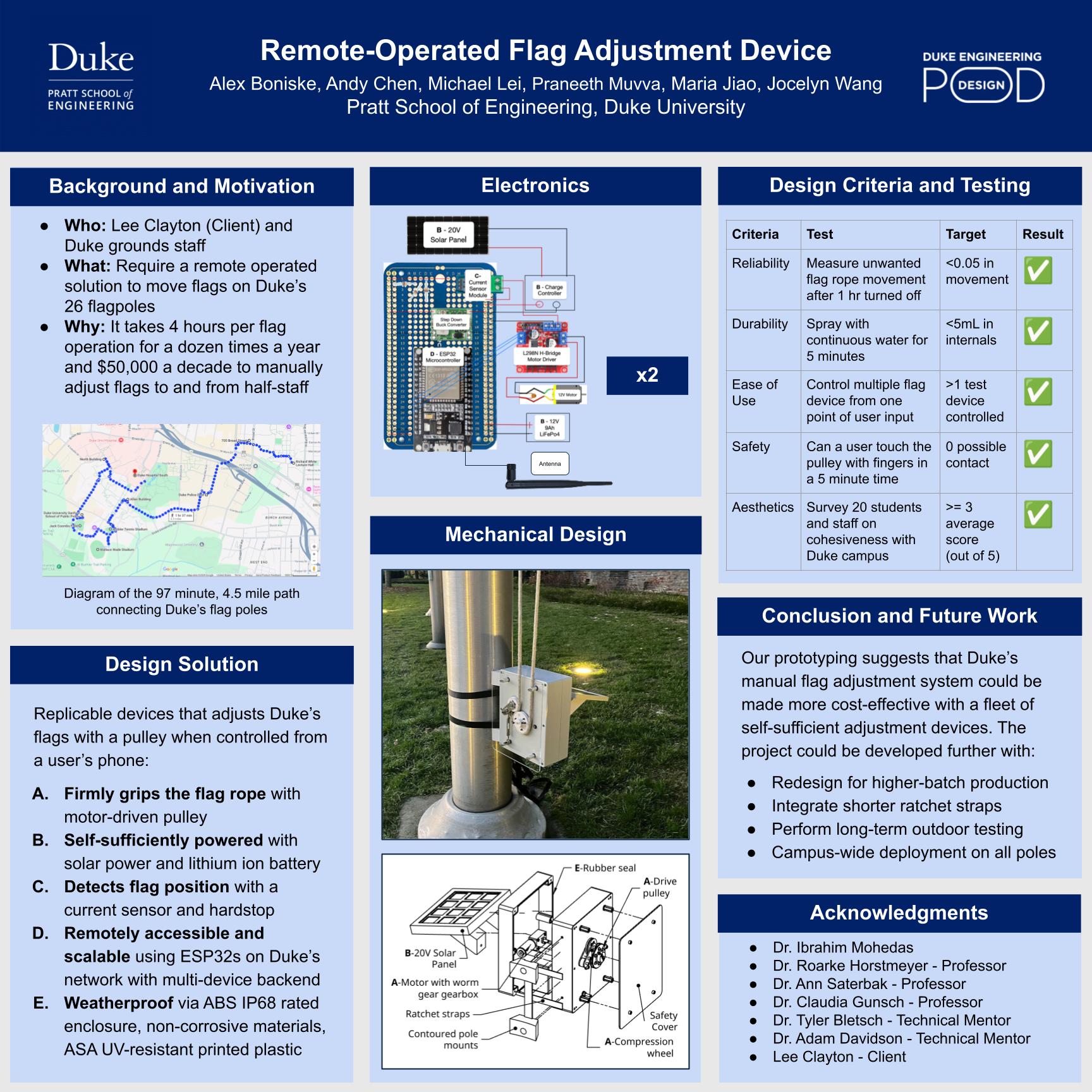
A self-sufficient and weatherproof system on Duke's network used for adjusting the flag positions across campus.
This project was completed during my tenure as a Duke freshman in EGR 101. I was joined by Praneeth Muvva, Michael Lei, and Andy Chen during the first semester, and later Maria Jiao and Jocelyn Wang for EGR 102. We were tasked with producing a system that could raise and lower Duke's flags autonomously for the ground staff.
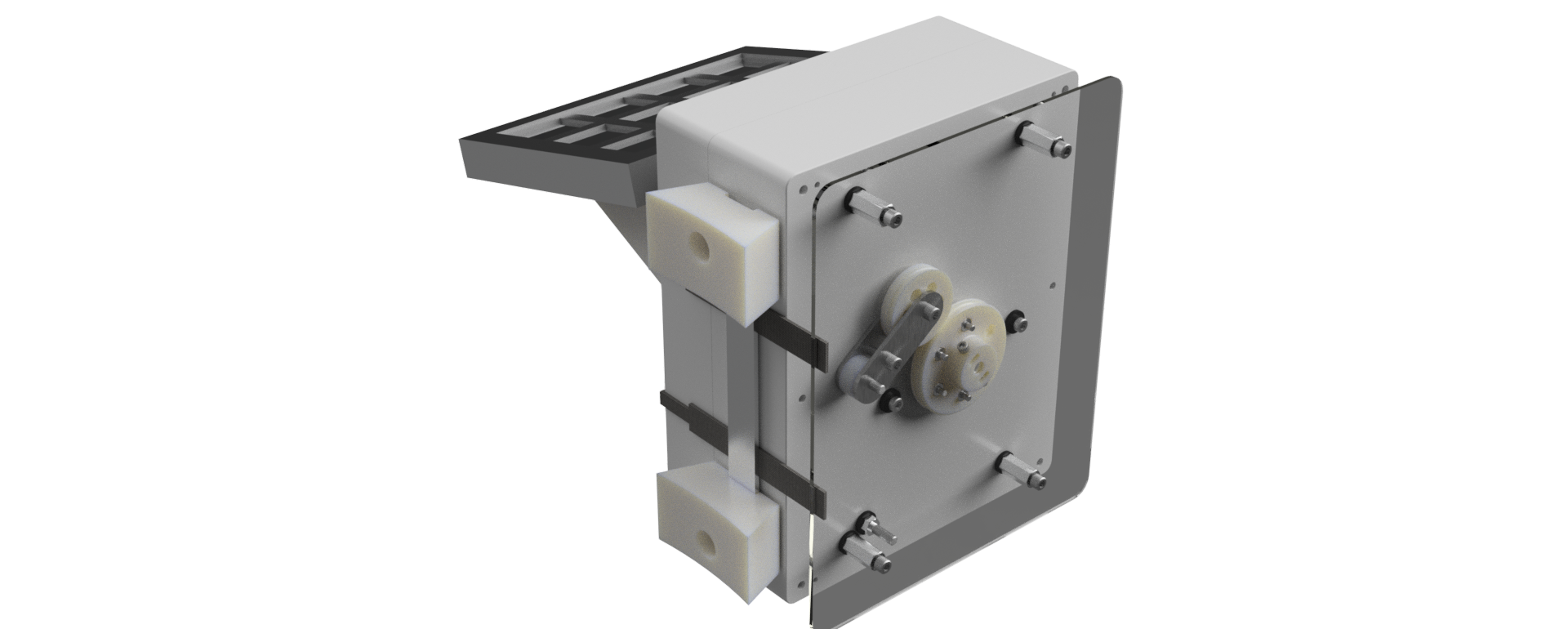
Over the semester, I was responsible for the mechanical design, electrical planning, and fabrication of our team's prototype. Our final prototype achieved an estimated IP68 ingress protection rating and was designed with weatherproof materials: ASA plastic for UV resistance, a weatherproof enclosure from McMaster-Carr to house the electronics, and rubber seals at all modified holes. Connecting the system to the flagpole was done with ratchet straps and contoured "pole mounts" I added to the sides.
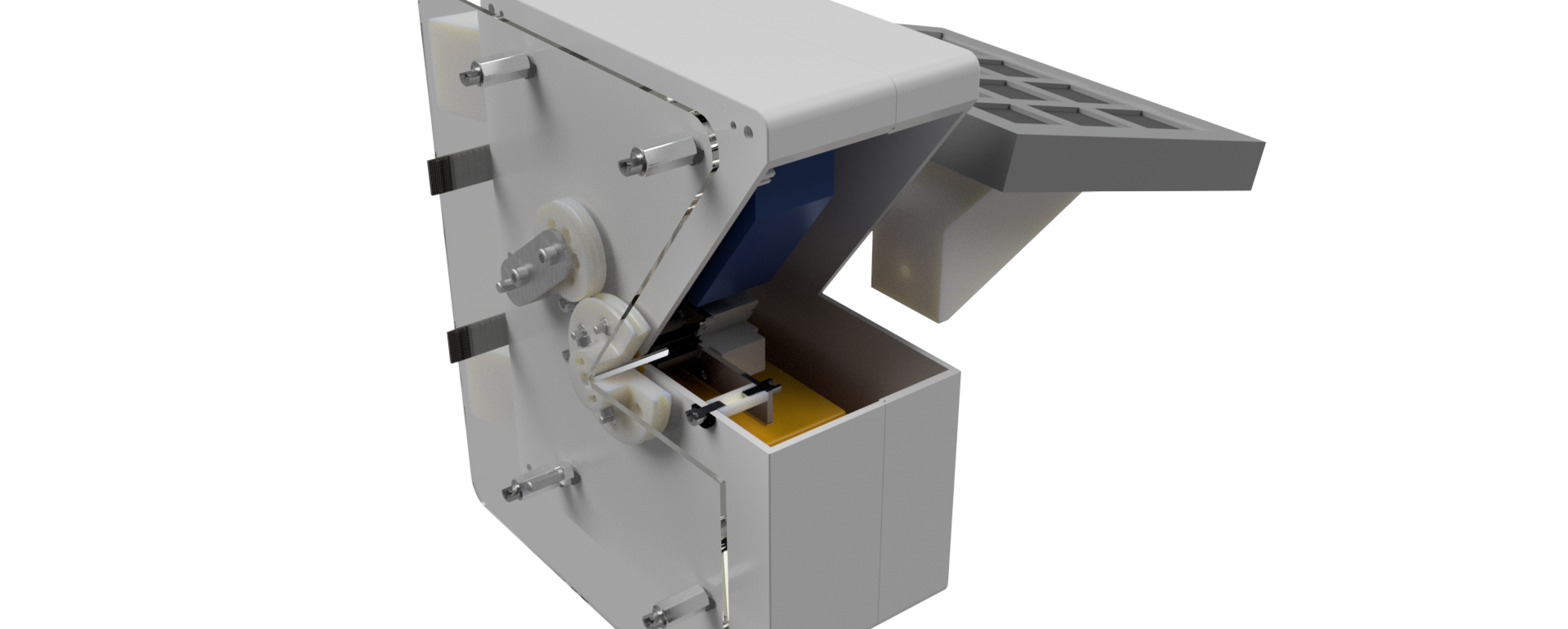
For power, the system had a 12V battery, a large solar panel, and a charge controller to keep it self-sufficient. The device connected to Duke's network via Wi-Fi where it hosted a web interface for remote control. Mechanically, the flag was moved by a motor that transmitted torque through a worm gear gearbox and compression wheel mechanism, preventing backdriving while powered off. After talking with our client, we found that the flag only needed to go to two positions, allowing us to use a hard stop and current sensor to limit the flag's movement.
The final assembly (pictured in the top right) had an aluminum shaft I turned by hand, waterjet aluminum plates for the compression wheel arm, and a ton of 3D printed parts. Tragically, our ESP was unable to consistently connect to the network, so the device was never fully deployed.